այստեղ եմ գտել։
#առնետ

Վոլֆգանգ Թիլիմանս առնետ, անհետանալով Wolfgang-Tillmans rat, disappearing #1995 #photography #photo #art #street #city #rat #ֆոտո #լուսանկարներ #արվեստ #փողոց #քաղաք #առնետ ##
#Wolfgang-Tillmans #Վոլֆգանգ֊Թիլիմանս
ու տենց
Ես առաջ մտածում էի որ շուն պահելու թերություններից այն է, որ երբ հիվանդանում է, պարալիզացվում ես։ էլ ոչ մի բան չես կարող անել, ոչ դասի ոչ աշխատանքի գնալ, իրոք գնալ, մտքով, ոչ մի բան անել չի լինում։
բայց արի ու տես շուն ունենալը պարտադիր չէ։
ինչ որ կոդ եմ քիչ քիչ բզբզում, լավացնում։
ու մտածում եմ՝ ինչի՞ համար եմ անում։
ասենք էն ծրագիրը գոնե Ավթանդիլյանին պետք էր։
ես ահավոր խիստ եմ լինում այն մարդկանց հանդեպ, ում անտարբեր չեմ։ էդ պատճառով տենց մարդիկ չեն լինում ։Ճ ասում եմ՝ քո մոտ ախր տենց լավ ստացվում է, մի քիչ եթե աշխատես, կազմակերպված, նենց լավ գործ կանես, ինձ պետք ա որ անես։ երեւի զարգացում եմ ուզում տեսնել, չգիտեմ։
իսկ ո՞ւմ ա պետք ես ասենք արնետազավրին ավարտեմ։
ՀԳ․ ինչ լավ ջազ միդիներ եմ գտել, օգնում է աշխատել։
ու տենց
ու տենց


_ու տենց _
ու տենց

ու տենց
Ես անցնում եմ գործի, ջենթլմեններ, եւ կարծում եմ որ հավես կլինի այդ գործի ընթացքը նկարագրել այստեղ։
Սույն կիսաբազկաթոռով վարպետ Համբսը սկսում է շարք մի պողպատե էակի մասին է, ավելի ճշգրիտ՝ շիկամուկի, ում անունն է՝ Առնետազավր։
Ոչ, ես չեմ վախենում «գողություններից», եւ վստահ եմ որ մտքերը թաքցնելն անիմաստ է, այսպիսով շիկամուկի ստեղծման ընթացքը կլինի բավականին բաց։ Ու այո, այս նյութը ցց է։ Ուրախ կլինեմ, եթե իմ տեքստերը օգտակար կլինեն որեւե մեկին, նույնիսկ մրցակիցների շարքից։
Սակայն, այն հանգամանքը որ իմ սիրելի տեքնոլոգիաները սպեցիֆիկ են, ավաղ, կարող է նվազեցնել այն էակների թիվը ում տեքստը օգտակար կլինի։
Ես օգտագործում եմ իմ ձեւով հավաքած մինիմալիստիկ Ջենթու համակարգ։ Եւ բնականաբար, ինձ պետք է քոմփայլեր։ Այժմ ես մտածում եմ, որ ինձ պետք է avr-gcc-ն։ Ու այն օգտագործելով ես հետագայում կփորձեմ ստանալ Օբերոն քրոսքոմփայլեր եւ գեներացնել avr-libc-ի կապեր Սթյուարթ Գրինհիլլի H2O ծրագրի օգնությամբ։
Սակայն քանի որ avr-gcc-ի ինետում առկա փաթեթները հին են, ու նույնիսկ թե հին չլինեին, ես միեւնույն է նախընտրում եմ հավաքել քոմփայլերի իմ ուզած տարբերակը ինքնուրույն ու իմ իսկ մեքենայի վրա։ Ինձ կօգնի քրոսքոմփայլերներ ստանալու համար նախատեղնված սկրիպտերի հավաքածուն՝ քրոսդեւը՝
Ասենք, ուզում եմ բինուտիլս 2.21 որ ակնարկի Հոլմսին, ու ջիսիսի 4.5.2։
հիմա մենք ունենք /usr/bin/avr-gcc , ունենք հեդերներ /usr/avr/include-ում, ու լիբեր՝ /usr/avr/lib-ում։
Եթե խնդիր լինի քոմփայլերը օգտագործելու հետ
ապա այն լուծվում է այսպես՝
Համակարգը տեստավորելու համար քաշում ենք ինետից ցանկացած օրինակ, ասենք վազող լույսերը այստեղից քոմփայլ անում, ու լցնում կոնտրոլերի մեջ։
Երեւի կռահել եք, որ ես խուսափում եմ գրաֆիկական գործիքներ օգտագերծելուց։ Դա արվում է հարմարավետության, մասնավորապես՝ ավտոմատացման հնարավորություն ունենալու համար։ Օրինակ, այդ է պատճառը ինչու ես պատրաստել եմ avrdude-ի հետեւյալ փաթաթանը՝
PORT=/dev/ttyUSB0 M=m16 #TYPE=dapa #TYPE=ponyser TYPE=siprog
FILE=Running_LEDs.hex
avrdude -p $M -P $PORT -c $TYPE -U flash:w:$FILE
Թայփը սիպրոգ ա, քանի որ Հովիկը հավաքել է սերիալ պորտով աշխատող այսպիսի մի պրոգրամեր։

Լույսերը հիմա, ստորեւ բերված նկարի պես վազվզում են, սակայն ես գիֆ սարքելու զահլա բնավ չունեմ՝
[}}
Այնպես որ զգոն եղեք լույսերի հետ, նրանք կարող են նաեւ վազել։
շարունակելի
ու տենց


















































_ու տենց _
О конкурсе уже писал smbatgogyan{.lj-user} здесь
Так как I was having fun, как видно на картинке

и мне было не до этого, я не писал, то есть не то чтобы совсем не писал, а не писал в ЖЖ 🙂
За день до мероприятия меня тоже можно было увидеть с двумя ноутами – в тот раз ноутбуки удобно расположились на рояле. Командам дали возможность потестировать роботов на поле с покрытием таким же, какое будет на конкурсе – рисунок тестовой трассы, понятное дело, отличался. А так как сие событие протекало в зале политехника, и рядом с роялем оказались розетки, то было бы глупо не использовать подручные рояли 🙂
“Зачем же целых два ноута?” – резонно спросите вы – и будете правы.
Во первых, конечно, для понтов. (“Ты же хакер!” (ц)) На самом деле, потому, что мне не удалось найти программатор avr с usb входом, а мой hovik made hand made программатор соединялся именно по параллельному интерфейсу. А lpt на моем ноуте нет!
Однако за два дня до конкурса меня осенило: если программатор не идет подходит к ноуту, то ноут может по до йти к программатору. Ноут с лпт портом оказалось достать просто в моем любимом офисе на Чаренца 1 🙂
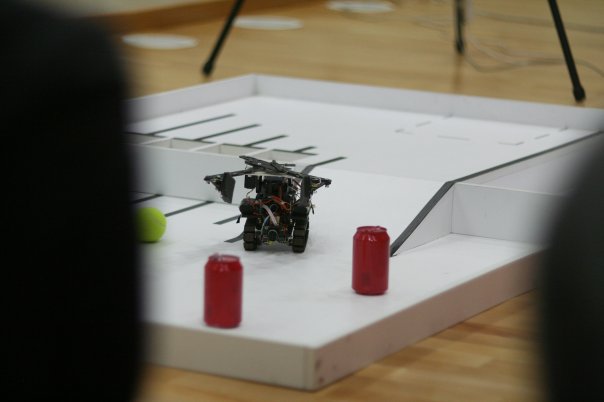
Именно там я расстилал экспериментальную трассу, на скорую руку сделанную из ватмана и черной изоленты.
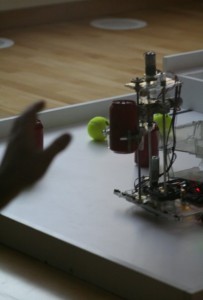
Сотрудники в нас верили, подводили всех гостей к крысе, и знакомили: “This is a rat… red rat… the winner… " 🙂
Спасибо Вам, дарагие. 🙂 “Я тэбя люблу” (ц) грузинское отделение офиса.
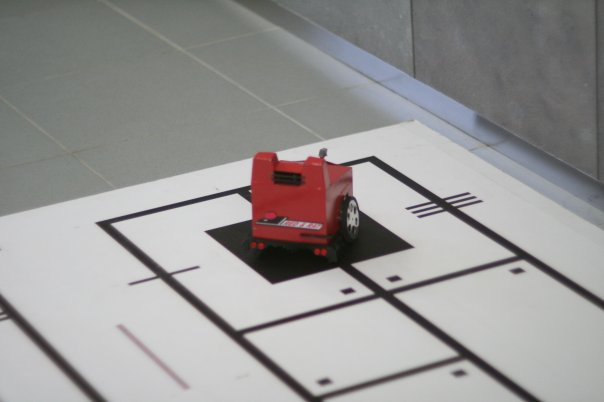
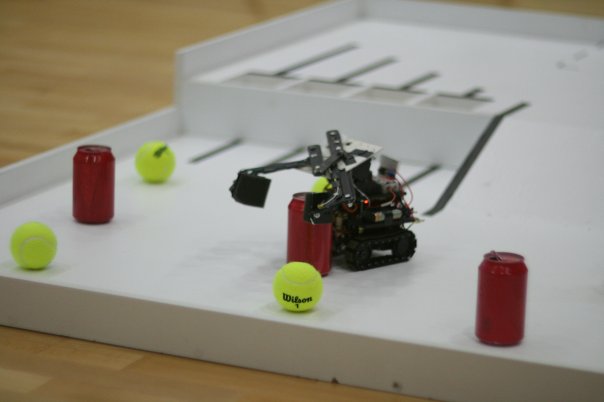
Если помните, первоначально крыса имела несколько другой вид
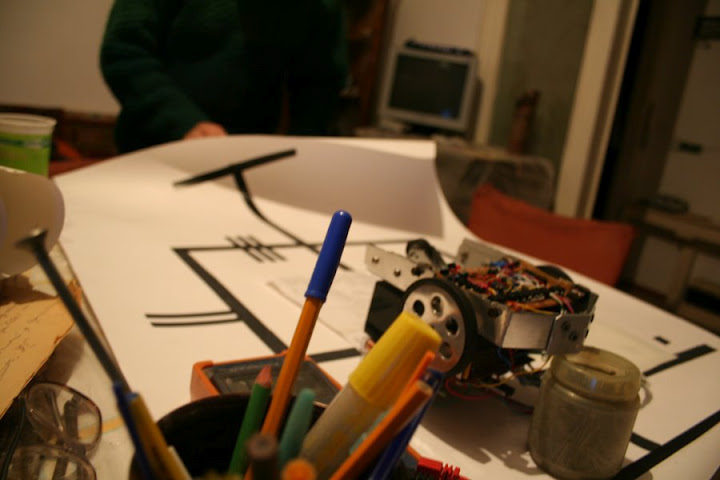
А сейчас стала короче, стройнее, добавилось свободно вращающееся колесо
так как без него повороты делать было трудно… я вернул робота дизайнеру и попросил все-таки заменить те два задние колесика на одно свободное, как на детской коляске, как и было задумано.
Однако это одно колесо оказалось слишком коротким… и часто крыса застревала на трассе, буксовала, потому, что падала на корпус, а колеса поднимались иногда в воздух.
Время и так поджимало, возвращать робота дизайнерам (Рубику с Кареном), чтобы они подправили длину колеса не совсем хотелось.
И я недолго думая взял ножницы и стал грубо резать аликобонд корпуса… Ножницы оказались не самым подходящим инструментом, и я продолжил работу офисным резаком… которым весьма успешно порезал себе палец, да так глубоко, что не мог остановить кровь в течение пятнадцати минут, заляпал ею пол офиса, и понял, что такими темпами следующие пятнадцать минут мне ее тоже не остановить. Бегать в аптеку за пластырем не хотелось, так как сторожа меня в здание больше не пустят – типа поздно (“мужчина, не паложена”(ц)) а так они меня выкурить не могут из офиса, я их не слушаюсь. Звонить по знакомым и спрашивать как остановить кровь хотелось меньше всего, уже хотел поискать в интернете, как услышал звуки за дверью – кто-то выходил или входил в соседний офис. Через секунду женщина в коридоре у соседнего офиса увидела парня с засунутым в рот пальцем, который спрашивает, нету ли у нее пластыря.
– Есть – ответила она… как раз оказался с собой – и поспешно дала мне
– Спасибо – ответил я – а вы вернулись в офис или уходили?
– Ушла, а потом вернулась
– Можно спросить как так вышло? – поинтересовался я
– Не знаю, просто захотелось вернуться – ответила она
Как вы уже догадались, вся работа была сделана в течение последних дней, ходовая часть и сама hardware крыса дошла до меня буквально за несколько дней до конкурса…
Примечательно, что электронщик команды, Hovik, он же art_green{.lj-user}, махнул в хопан эмиграцию, и сейчас благополучно работает в славном городе Питере… на стройке… нет, не строителем… – электриком 🙂
(Знаю одного типа, владельца ряда магазинов в Ереване и Октемберяне, его друзья величают – “олигархом”, так вот он настолько озабочен влиянием мирового кризиса на Армению, что хочет закрыть свои магазины и уехать в Сочи работать крановщиком)
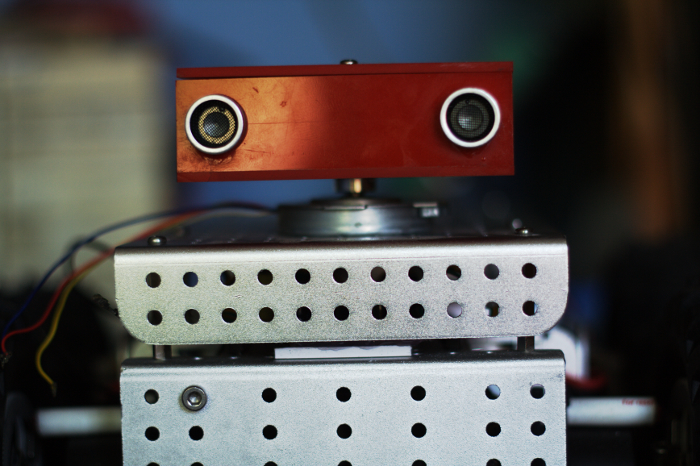
Соответственно возникшие проблемы пришлось решать без Овика… а вопросы возникли – пришлось менять расположение инфракрасных датчиков, снижать скорость движения, исправлять баг в пайке power switching supply – вообще работа типа исследовательской и трудно продумать все сразу, а затем ничего не менять.
А самая большая проблема оказалась такой: часть датчиков вела себя непредсказуемо – казалось что видят они дорогу, или нет, зависит от чего угодно – времени суток, скорости дрейфующих айсбергов…
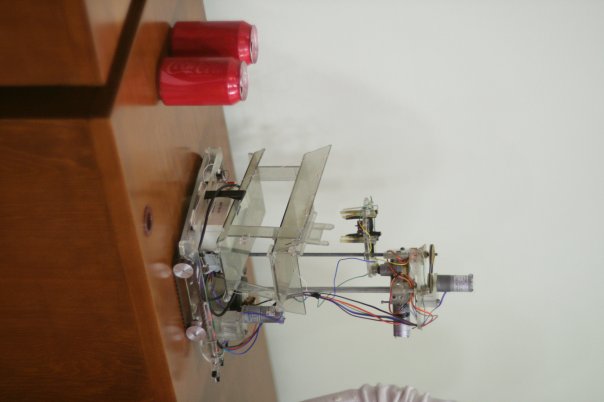
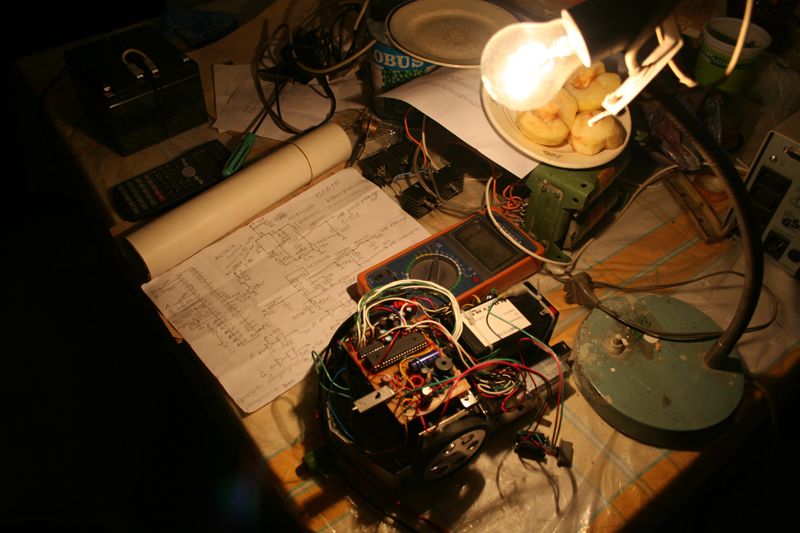
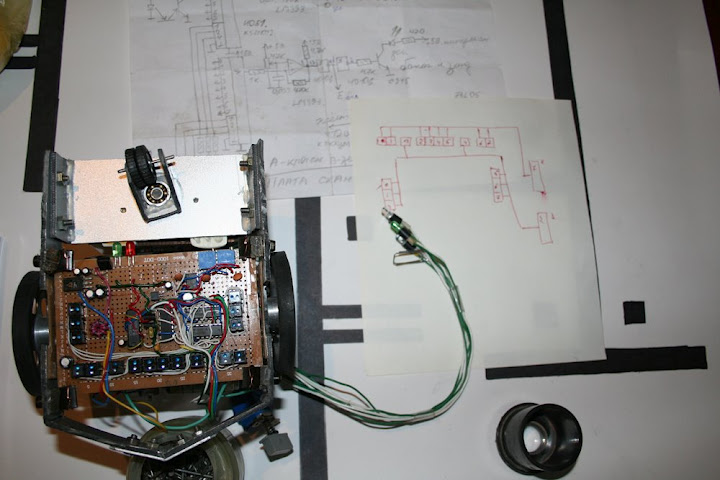
И тут неоценимой оказалась помощь электронщика Рубика – это на его столе сделаны фотографии выше
Я вообще концептуально был против обращаться к взрослому профессионалу, так как наша крыса отражает реальное положение дел в команде и мы такие какие есть… если есть, а Овика уже не было, и выхода не оставалось…
Для отладки я запрограммировал крысу так: перед стартом она просто зажигает определенный светодиод если видит определенным глазом линию. Пока не увидит дорогу, не начнет двигаться. Отверткой можно подкрутить переменное сопротивление, регулирующее чувствительность датчиков и добиться того, чтобы светодиоды зажглись… однако через некоторое время, даже если робота вообще не трогать… он переставал видеть, а точнее везде начинал видеть черный цвет… тогда приходилось подкручивать сенсор обратно
Другая часть инфракрасных датчиков видела линию четко, независимо от всего… то есть понятно, что по дороге между частью светодатчиков и микроконтроллером (мозгами крысы) происходило что-то загадочное.
Шутка дизайнера Рубика, когда он цитировал песню эмпи рей “sev u spitak, tars u shitak yes chem karogh tarberel” казалась совсем не к месту…
Моего недалекого в электронике ума хватало только на то, чтобы заподозрить слабый контакт или испорченное переменное сопротивление но в тот момент, когда на моих глазах светодиоды забытой на черной линии крысы постепенно, в течение пятнадцати секунд загорелись, я понял что тут о контактах нечего и думать – видимо когда что-то нагревается, чувствительность датчиков меняется. Но что? И почему?
Взял крысу – и к Рубику – электронщику.
– Ну дорогой, откуда же я знаю где у нее плывет – развел руками Рубик. Тут у тебя и мультиплексор, и компаратор, и вот этот кондик может течь… вот этот воспик видишь? это конденсатор
– Я знаю что такое конденсатор
– Ну его можем и поменять, но на самом деле надо детально обследовать все элементы… сколько говоришь у нас времени, завтра утром уже? да, не успеем, просто поменяем воспик, так как очень вероятно что он и течет
– А в электронике сборщика утечек не бывает? – спросил я
– Ну как сказать, – ответил Рубик – и стал работая объяснять мне насчет утечек и возможных методов борьбы с ними
В семь утра я проснулся и протестировал крысу. Вечером она как на зло работала превосходно, и до и после замены конденсатора. С утра опять глюки. Видимо, остыла, замерзла. Ее как машину зимой, нужно прогревать перед стартом – то есть заставить работать, ходить кругами, а при работе садится аккумлятор.
Кроме того, роботов перед началом конкурса забирают на допинг контроль, так как трасса уже видна и его можно перепрограммировать на прохождение конкретного пути. Сколько времени нужно на прогрев крысы я точно не знал – каждая команда имеет в своем распоряжении 30 минут на подготовку и прохождение трассы. Успеет ли прогреться та неизвестная деталь, которая должна прогреться?
Да, и именно из-за этого возникли глюки с распознаванием знака поворота налево… я лихорадочно пытался изменить алгоритм так, чтобы крыса основываясь на интуиции делала эвристические выводы о наличии знака. Но не успел. Пора портировать libastral на avr микроконтроллеры :)))
Продолжение следует